Montaje 13 Barrera I por Bluetooth
El propósito es que cuando se pulse la flecha arriba de la APP DEL MOVIL la barrera suba y se enciende la luz verde, y cuando se pulsa la flecha abajo, baje la barrera y se enciende la luz roja, esta es una manera eficaz de que nadie entre en el recinto si no está autorizado, y que mejor que con una aplicación móvil.
SIN EDUBÁSICA
Hay que utilizar el esquema del servo
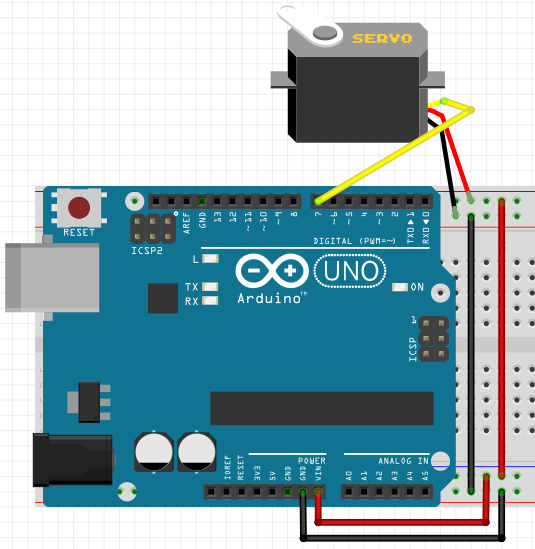
y el esquema del Bluetooth a la vez

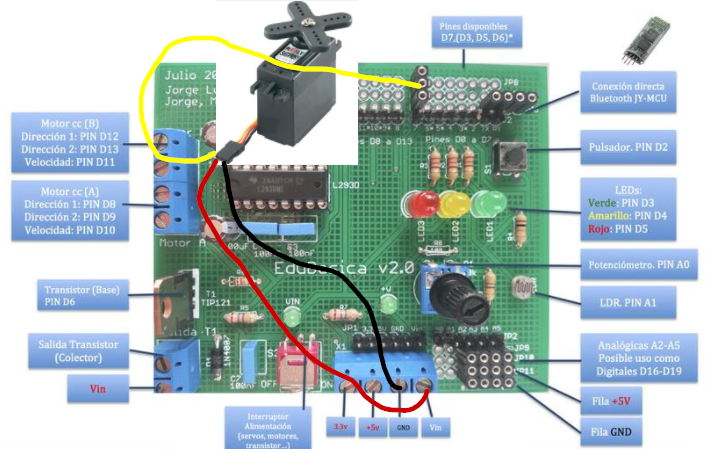
CON EDUBÁSICA
Nos simplifica el cableado, conectando el módulo Bluetooth en el zócalo correspondiente tal y como vimos

Con piezas de lego fijamos el servo y le añadimos un cartón que simule una barrera. El pin del servo lo conectaremos en el 7 de Edubásica, el Vcc y G a Vin y masa.
Continuamos ...
La configuración de los ángulos de abierto y cerrado depende en qué posición atornillamos la barrera, luego lo mejor es probarlo con el programa que test que vimos, y en nuestro caso nos sale que 40º es abierto y 140º es cerrado.

Resultado
(no hagas caso de los sensores de ultrasonidos por ahora, corresponde al siguiente montaje)
No desmontes las conexiones, te servirán para el siguiente montaje.
El programa en el Arduino es el siguiente:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
String readString;
#include <Servo.h>
#include <Servo.h>
Servo myservo; // crea un objeto tipo servo para controlar el servo
int pos ; // variable para almacenar la posición del servo
byte dato;
int ledArriba = 3; //LED ROJO DE EDUBASICA
int ledCentro = 4; //LED AMARILLO DE EDUBASICA
int ledAbajo = 5; // LED VERDE DE EDUBASICA
void setup(){
myservo.attach(7); // En EduBasica el servo se conecta al pin 7
Serial.begin(9600);
pinMode(ledArriba,OUTPUT);
pinMode(ledAbajo,OUTPUT);
pinMode(ledCentro,OUTPUT);
}
void loop()
{
if (Serial.available()) //Guardamos en la variable dato el valor leido
dato= Serial.read();
//Comprobamos el dato
switch(dato) {//Si recibimos una ... 85=ARRIBA 68=U=ABAJO
case 85: //ARRIBA
digitalWrite(ledArriba, HIGH);
digitalWrite(ledAbajo, LOW);
digitalWrite(ledCentro, LOW);
pos=40;
myservo.write(pos);
delay(1000);
break;
case 68: //"U": ABAJO
digitalWrite(ledArriba, LOW);
digitalWrite(ledAbajo, HIGH);
digitalWrite(ledCentro, LOW);
pos=140;
myservo.write(pos);
delay(1000);
break;
}
}