3.2 Comenzamos
El montaje de este robot es complejo, ánimo !

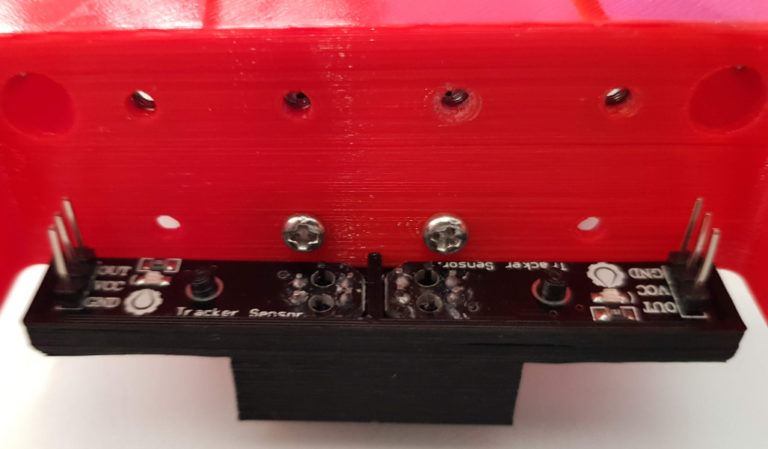
3.2.1 Seguidor siguelineas y bola loca
Ponemos la bola loca y los seguidores en el soporte con los leds hacia abajo:

Fuente: https://mclon.org Maria L CC-BY-SA
Atornilla el sorpote al chasis y conecta los cables pasándolos por el orificio:
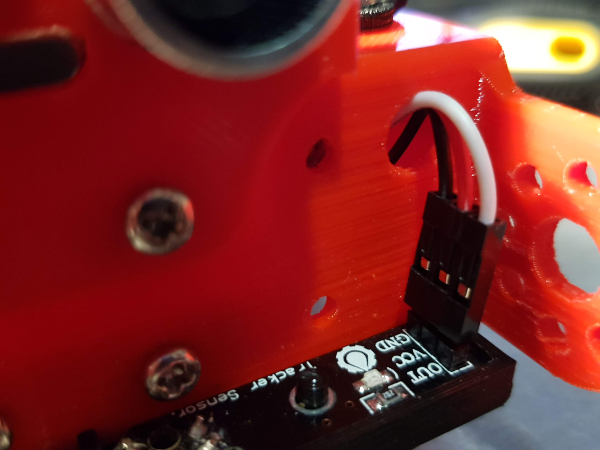
Fuente: https://mclon.org Maria L CC-BY-SA
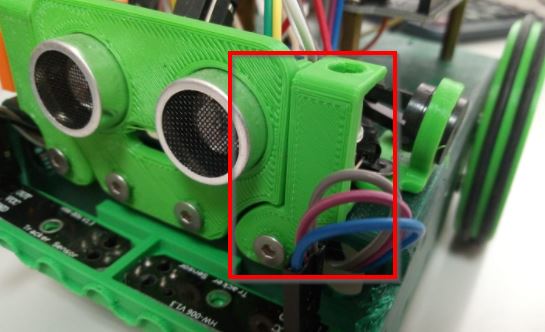
3.2.2 Sensor ultrasonidos
El sensor ultrasónico en el soporte, encaja justo para que no se caiga. Pon el soporte con dos tornillos en el chasis:
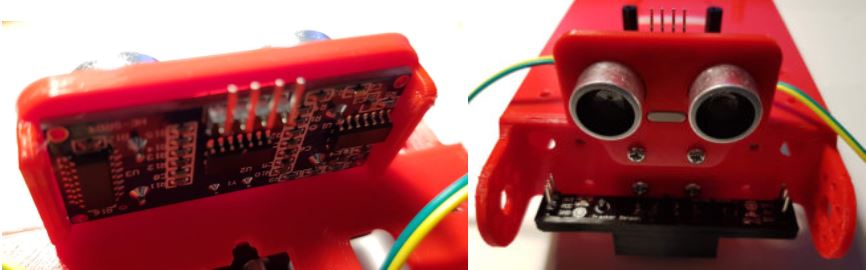
Fuente: https://mclon.org Maria L CC-BY-SA
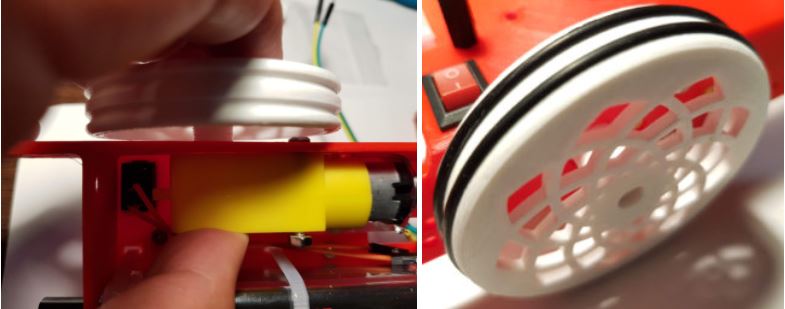
3.2.3 Motores y ruedas
Los motores, con 4 tornillos largos y pasa los cables por los orificios :
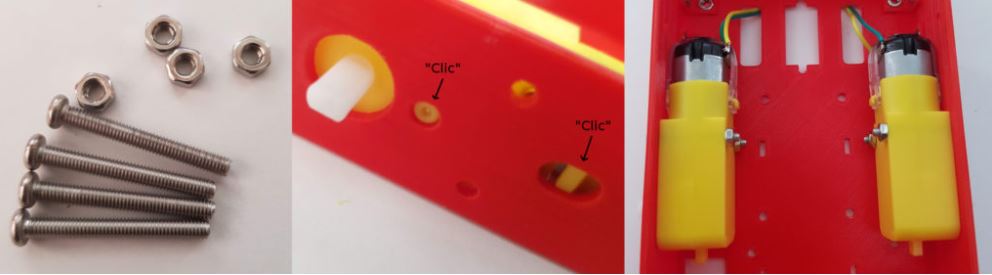
Fuente: https://mclon.org Maria L CC-BY-SA
Pon las juntas tóricas en las ruedas y pasamos a su colocación: Las ruedas encajan muy justas, esto es así para evitar que con los golpes se desileneen. Hay que presionar con los dedos, si ves que cuesta puedes pasar una lima por el orificio para rebajarlo un poco. Fíjalo con los tornillos.
Fuente: https://mclon.org Maria L CC-BY-SA
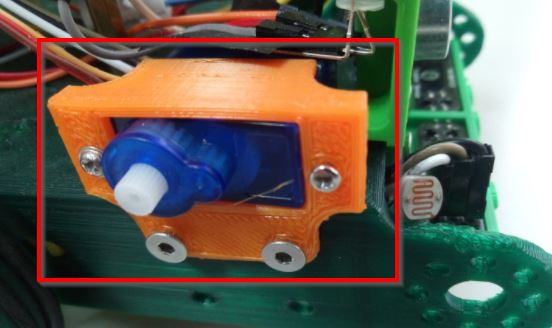
3.2.4 placa y accesorios
Pon los soportes de los leds RGB
Pon el soporte del servo al lado izquierdo (mirándolo a los ojos el ultrasonido)
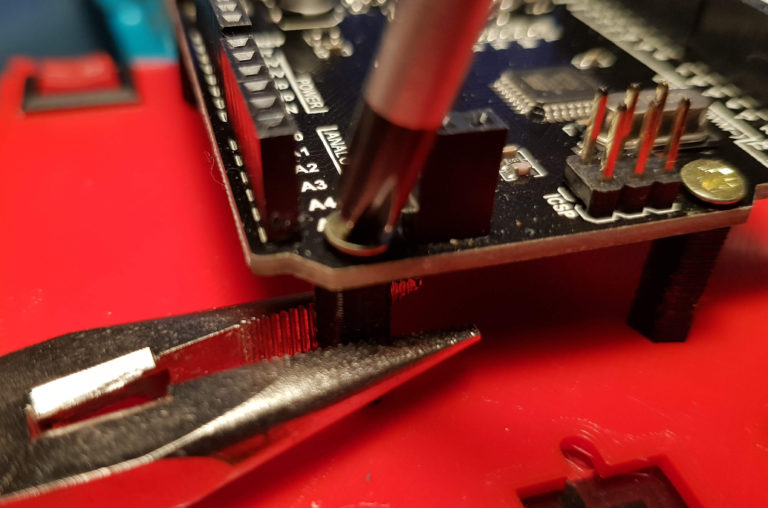
Fija la placa al chasis
Fuente: https://mclon.org Maria L CC-BY-SA
Fija el soporte del zumbador al lado derecho (mirándolo a los ojos el ultrasonido):

Fuente: https://mclon.org Maria L CC-BY-SA
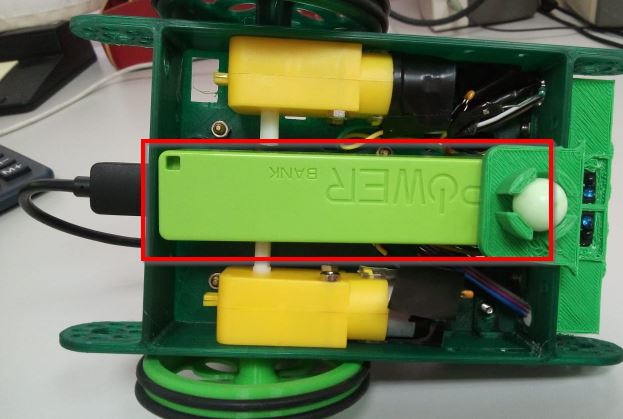
3.2.5 Powerbank
El Powerbank se sujeta muy bien, pues en un extremo tiene el cable USB, en el otro extremo tiene la bola loca :
Y podemos poner un velcro para asegurarnos que no se mueva :
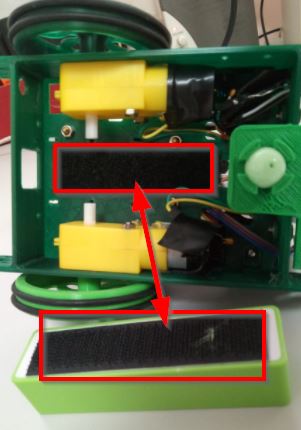
Esto permite sacarlo si fuese necesario, pero para tanto para la carga, conexión y desconexión del mClon no hace falta sacarlo nunca.
- Carga: Conectar el cable USB en el orificio microusb

- Conexión y desconexión del mClon por el puerto USB grande

![]()
mClon por https://mclon.org bajo licencia Creative Commons Reconocimiento-CompartirIgual 4.0 Internacional License.