1.3 SENSORES
1.3.1 Sensor sigue líneas infrarojos
Utilizamos el tracker sensor TCRT5000
![]()
Tal y como hemos explicado en Partes impresas no tiene que estar cerca de la línea.
En https://tecnoloxia.org/mclon/robotica/os-sensores-ir-de-lina/ explica muy bien cómo funciona:
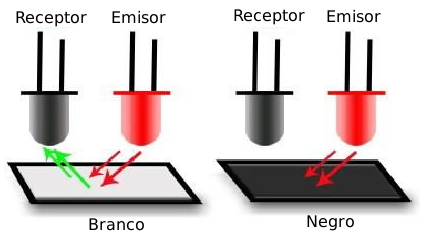
Fuente: https://mclon.org/ Maria L CC-BY-SA
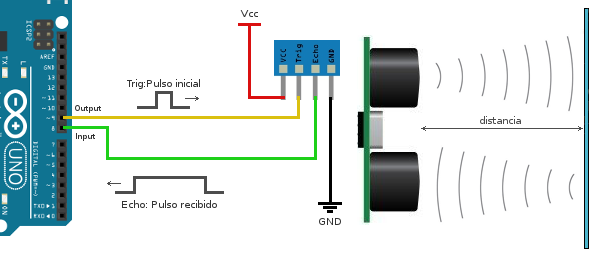
1.3.2 Sensor evita obstáculos ultrasonidos
Se utiliza el sensor HC-SR04
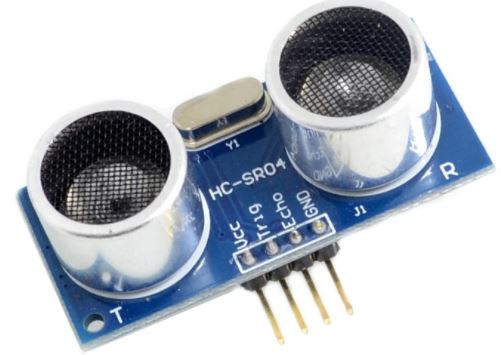
En https://tecnoloxia.org/mclon/robotica/o-sensor-ultrasonico/ explica muy bien cómo funciona:
1.3.3 Sensor de luz
Es un LDR que conectado en serie con una resistencia nos proporciona un valor de tensión, pues el LDR varía su resistencia con la luz (a más luz, menos resistencia)
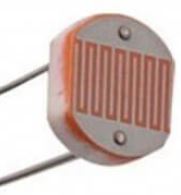
En nuestra propuesta sólo va a tener un LDR, pero se pueden añadir dos LDRs fácilmente, ver 2.2
![]()
mClon por https://mclon.org bajo licencia Creative Commons Reconocimiento-CompartirIgual 4.0 Internacional License.