Test de botonera
Antes de seguir es muy importante que aprendas a realizar el test de botonera. Lo tienes perfectamente explicado en este enlace de la web oficial escornabot.
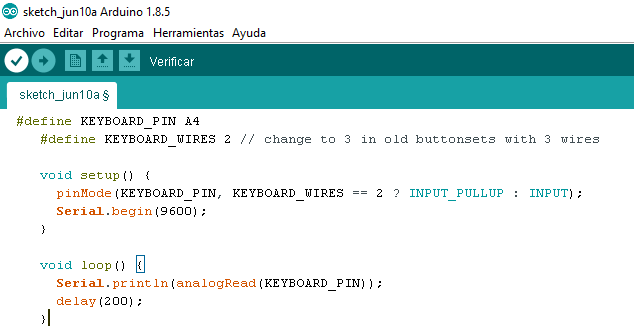
Abre arduino, un nuevo proyecto y borra el código que aparezca.
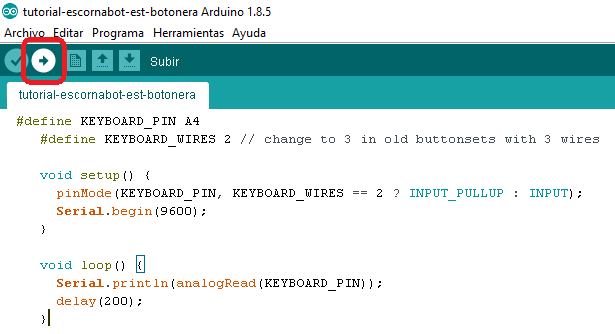
Pega el siguiente código:
#define KEYBOARD_PIN A4
#define KEYBOARD_WIRES 2 // change to 3 in old buttonsets with 3 wires
void setup() {
pinMode(KEYBOARD_PIN, KEYBOARD_WIRES == 2 ? INPUT_PULLUP : INPUT);
Serial.begin(9600);
}
void loop() {
Serial.println(analogRead(KEYBOARD_PIN));
delay(200);
}
- Conecta el Arduino Nano al ordenador mediante un cable USB.
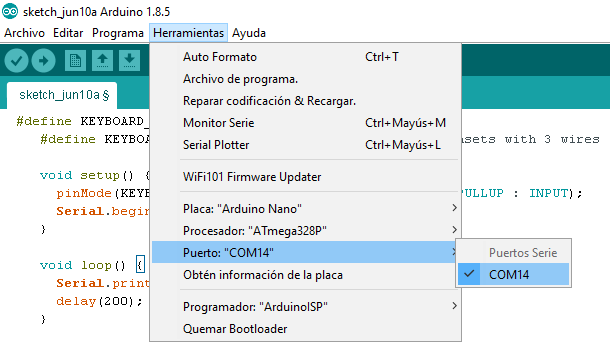
- En la pestaña herramientas selecciona como placa "Arduino Nano".
- En la pestaña herramientas selecciona como procesador "Atmega328P".
- En la pestaña herramientas selecciona el puerto del PC al que lo has conectado, en mi caso "COM14".
En las últimas versiones del IDE Arduino hay un cambio que afecta a las placas que utilizamos y debemos seleccionar en procesador; "ATmega328P (Old Bootloader)"
Toda la información en esta entrada
Ya tenemos todo listo para cargar el código.
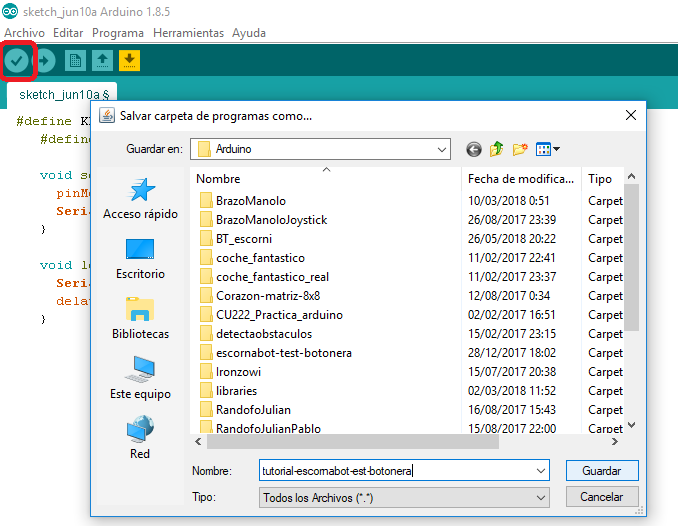
- Primero le damos al botón de verificar, lo tienes en la parte superior izquierda con un símbolo de una "V", al pulsar se abrirá una ventana para que guardes el proyecto con el nombre que te apetezca:
En la parte inferior nos tiene que aparecer el mensaje en Azul de compilado.
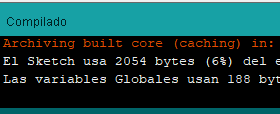
- Con este paso hemos confirmado que el código lo tenemos copiado de manera correcta.
- Ahora vamos a subir el código a nuestra placa, para eso pulsaremos en el botón con forma de flecha que tenemos al lado de verificar:
- Si todo ha ido bien en la parte inferior nos tiene que aparecer en azul "Subido" y ningún mensaje de error:
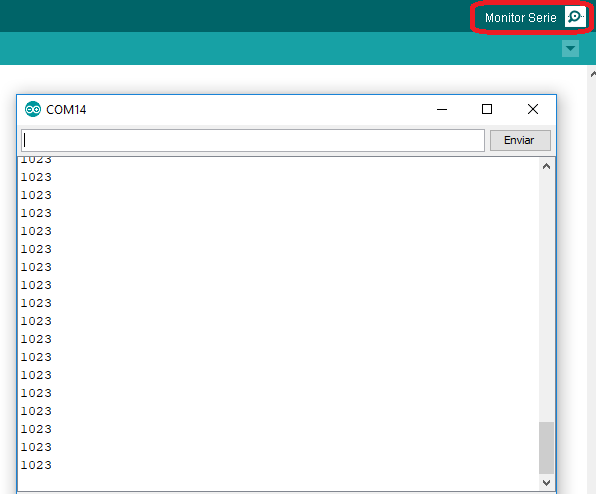
- Ahora abrimos el monitor serie pulsando en la lupa que hay en la parte superior derecha y nos aparece una ventana con un valor en torno a 1023. Cada vez que dejemos pulsado un botón este valor cambiará, anota el valor de cada botón.
Recuerda, la parte delantera del robot son los motores y el cableado. La parte trasera, la bola.

Escornabot, un robot gallego Open Source. La recopilación de material de este curso ha sido elaborada por Pablo Rubio Martínez bajo licencia Creative Commons Attribution-ShareAlike 4.0 International (CC BY-SA 4.0).