Reto 4 Seguir la línea
Otro reto que pide a gritos este sensor:
Consejo: en clase, antes de atacar con este reto, aconsejamos otro más sencillo como que el robot se mueva y si encuentra línea que se pare, este reto lo puedes ver aquí
Descripción del programa
Al empezar configuraremos los sensores en PULL-UP tal y como hemos explicado:
 Luego entramos en el bucle donde simplemente dice:
Luego entramos en el bucle donde simplemente dice:
- Sigue hacia delante
- Lee los sigue-líneas
- Si te desvías hacia la derecha gira a la izquierda
- Si te desvías hacia la izquierda gira a la derecha
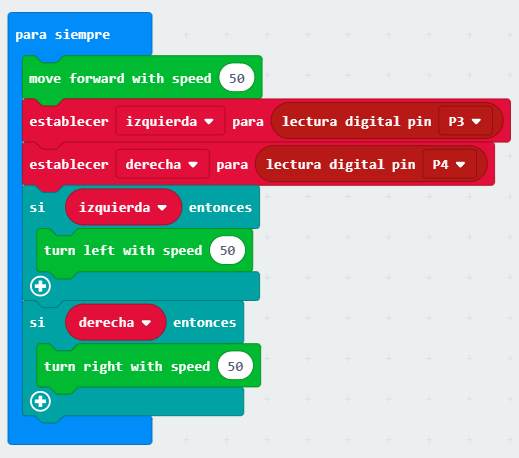 El programa tiene la pega que si aumentamos la velocidad, pierde la línea.
El programa tiene la pega que si aumentamos la velocidad, pierde la línea.
Evidentemente hay muchas versiones y mejoras, por ejemplo aquí pero ésta https://makecode.microbit.org/_U3VP8JhVTXaJ es desde luego la versión más sencilla.

MicroBit + SmartCar por Javier Quintana Peiró bajo licencia Creative Commons Reconocimiento-NoComercial-CompartirIgual 4.0 Internacional License.