Sensor de línea
El sensor de líneas está situado en la parte inferior de mBot:
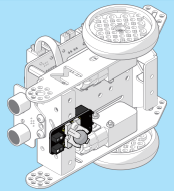
Fuente: Tutorial de http://makeblock.es
Y tiene los siguientes valores:
- 0 si detecta todo negro (en binario 00)
- 1 si detecta blanco derecha pero negro a la izquierda (01)
- 2 al revés (10)
- 3 si detecta los dos blancos (11)

Fuente: Tutorial de http://makeblock.es
Reto, la obeja en su redil
Ponemos a mBot en un recuadro blanco con el borde negro (descarga A3), queremos que hagas un programa que no salga nuestro robot del "redil".
Consejo: Poner velocidad 100 pues si va rápido (255) se salta la línea.
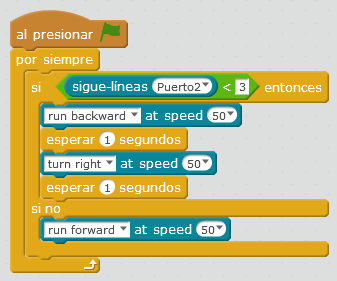
Fuente: Captura de pantalla mBlock. Programa: el autor. ¿y si ponemos de velocidad 200 en run forward, qué pasaría?
Problemas: No funciona bien, se salta la línea
Esto es debido a que desde que mBot comunica a nuestro ordenador que ha detectado una línea negra, y por lo tanto el ordenador lo procesa, y manda la órden de dar marcha atrás y dar la vuelta... mBot ya se ha pasado de raya ... :(
Sobre todo en equipos viejos.
Solución: Hazlo independiente del ordenador. Mira cómo hacerlo en M3 Upload to Arduino